



全自動端子收料機操作方式
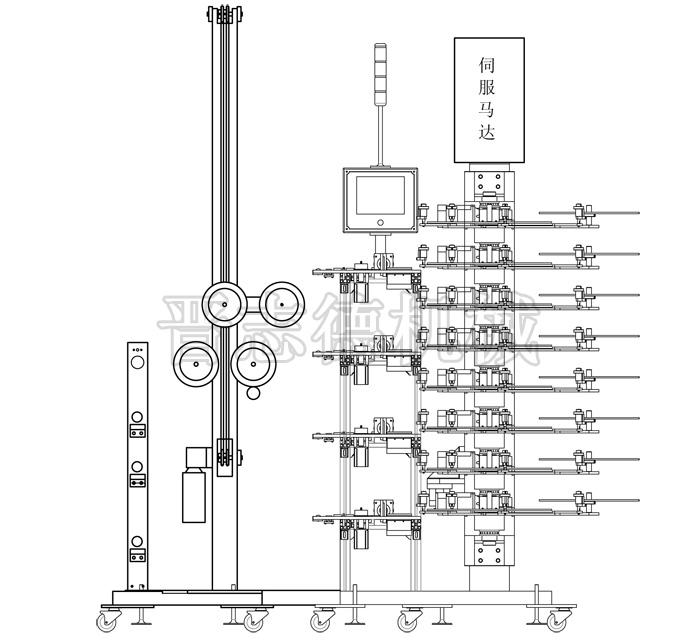
全自動端子收料機主要有四個部分構成:光電部分,存儲器部分,入料部分和主機部分。伺服馬達控制端子盤上下升降,由于沖床速度快,而且換盤時間少,增加存儲器裝置(目的是換盤時存儲端子,收料時釋放端子);端子盤的速度采用光電傳感器分段控制,同時利用光電控制存儲器的啟停,每部分都由電氣控制,同時每部分又相互關聯。
光電部分主要有16個光電傳感器,分成四組,通過PLC產生不同的速度,同時有急停信號的上下限,控制全自動端子收料機的急停。
存儲器部分有個小伺服馬達控制,其目的是控制存儲器的上升和下降,有兩個傳感器控制其上下限。
入料部分:有8個步進馬達、4個高速計數裝置、12個氣缸、24個傳感器,其中一組伺服馬達負責送料,另外一組馬達負責變化角度轉角(即在運轉構成,會緩慢運轉,有傳感器來實現定位和限位。)
主機部分:有1個大伺服馬達、8個蝸輪馬達、8個紙帶傳感器,大伺服馬達主責全自動端子收料機主軸上下升降,蝸輪馬達負責端子盤的運轉,傳感器負責檢測紙帶有無,從而通知端子收料機急停。
晉志德全自動端子收料機操作分成兩部分,即手動狀態和自動狀態。
在手動情況下,全自動端子收料機主軸可以實現上升與下降,并且有其手動速度,同時可以根據需要進行主軸定位,定位距離可以調整;存儲器的小伺服也可以手動上升或下降,并由其速度調整。收料盤8盤可以各自立運轉,并速度可調,同時方向可以調整;入料部分的各個氣缸都可以立操作;四個步進馬達也可以自運轉,手動速度可調(即在手動情況下,全自動端子收料機的動作都能實現人為控制。
在自動情況下,存儲器的小伺服升降可以根據主機部分的運轉狀態,并通過光電傳感器檢測端子的下垂量,來控制存儲器的運轉(上升或者下降,速度變化)。當所有條件復位,不發生干涉的情況下,主機正常啟動后,能夠進行自動收料,其速度主要有端子在光電傳感器的位置來確定。當料盤收取完成后,后步進馬達帶動入料裝置回歸,回歸后伺服馬達帶動主軸上下運轉(其中入料部分的一組氣缸動作夾住材料,并切斷材料,同時驅動前步進馬達運轉并送料,此時裁斷材料并取樣,之后回位置),進行自動換盤,(此過程由于沖床不停機,會產生多余的端子,此時根據端子的下垂量,自動控制存儲器的上升或停止),換盤完成后,主機部分自動進入生產后,此時存儲器下降,并根據光電部分的光電傳感器控制其速度。在收料過程中,端子收料馬達的速度由光電傳感器來控制,換盤時定位準確,換盤后又可以進行自動生產,循環使用。
8個紙帶傳感器有自立開關,可以進行有無控制;各自操作過程中的復位和互鎖功能;顯示屏有報警提示功能;計數功能。
文章發表:http://www.pingjiamianmo.cn/news_qzddzsl.html